I recently completed a job as an advisor to an airborne multi-spectral sensor system project. My tasks included advice on lens mounting (metal rings vs. adhesive bonding), environmental sensitivities (temperature, vibration and shock), alignment procedures (tooling and adjustments) and manufacturing processes (bonding, glass finishing and failure analysis).
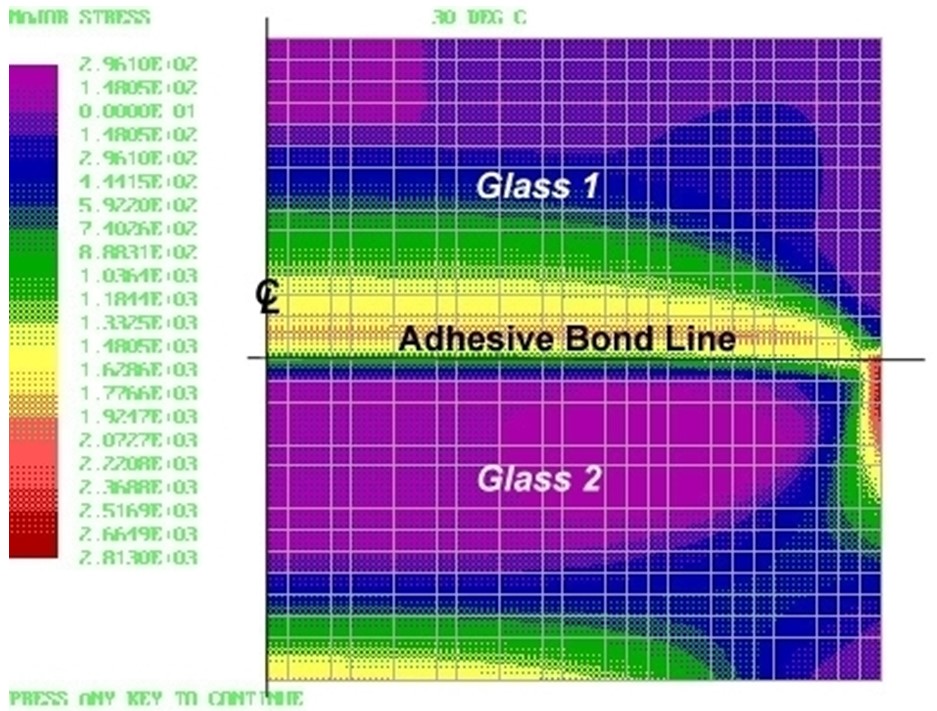
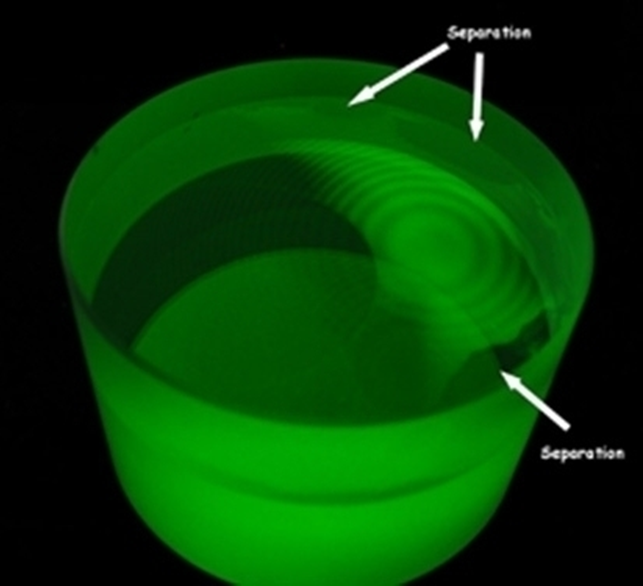
A major concern was the fracture of cemented lenses at high and low temperatures. Understanding the physics of glass fracture was instrumental in both understanding the causes of the fractures of cemented assemblies and designing them to avoiding failures in the service environment. The figures below show the analysis and test of a cemented glass coupon. The contour plot shows the stress distribution in the test coupon and the photo shows the resulting de-lamination and fracture at low temperature.
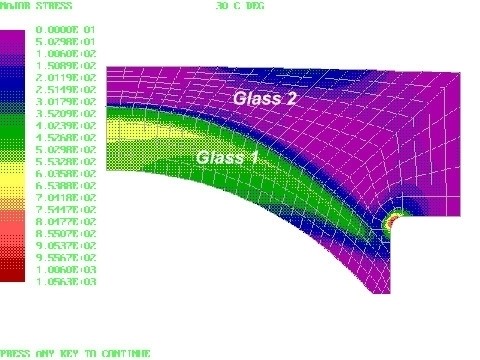
In one of the finished cemented doublets, analyzed below, the fillet in Glass 2 needed special finishing to strengthen it against the stresses at low temperature.
This project was very challenging. Great sport!
I hope your summertime was as interesting as mine.
I’ll be presenting my tutorial “Optomechanical
Analysis” at SPIE’s Optics and Photonics Symposium. The
time and date are:
28 August 2007
830 AM to 530 PM
Marriott Marina Hotel, San Diego and
San Diego Convention Center (next door to the hotel)
I’ll be discussing and comparing various methods to evaluate the
mechanical engineers’ impacts on the optical instruments and systems they
design and analyze. You may read the abstract and sign-up for the course by clicking on the following web-site:
I’ll also be hosting a meeting of the Optomechanical/Instrument Technical
Group that same evening, the 28th, 8 to 10 PM. Larry Stepp will be
our feature speaker and will discuss the mechanical challenges of the Thirty
Meter Telescope project, of which he is the Telescope Department Head.
Following Larry we’ll get an up-date from Rob Bernier on how he implemented
some of your suggestions from last year’s meeting on metrology challenges in
the JWST project at Tinsley.
Then, on Wednesday the 29th and Thrusday the 30th I and some of our colleagues
will chair sessions of our biennial conference, “New Developments in
Optomechanics.” We’ll have over 30 oral presentations during the
days and almost a dozen poser papers Wednesday evening.
It ought to be a great time! I hope to see you all there.
“Find a way to assure a 7 microradian
boresight shift
and image jitter performance specification for a mid-wave FLIR
in an airborne thermal and random vibration environment”.
The solution used the Unified Modeling mode of the Ivory Optomechanical Modeling Tools. Ivory
accurately modeled the imaging behavior of the FLIR and generated a NASTRAN
optomechanical finite element model for the dynamic analysis.
The model’s results were validated against Zemax environmental analyses,
longhand (Excel, actually) calculations and rigid body checks in NASTRAN giving
the instrument’s focal length. (Yes, NASTRAN can calculate the focal length
of on optical instrument.) The indicated uncertainties were all less than
1.8%.
The model turned out to be a very effective design tool. It was run more
than 50 times over a few weeks. We were able finally to demonstrate
safety margins of between 25 and 1000 on the image jitter and boresight shift
requirements.
You may see some of the product from this effort in the attached
“pdf” file. My client has all of my modeling files, which are
heavily annotated, so he can “mesh” his ProE solid models as they
mature and replace the beam and shell elements of my early model. Ivory’s
Unified Optomechanical Model will work, of course, in any NASTRAN model
he chooses to put together to check the progress of the design.
The Ivory Optomechanical Modeling Tools
answered the challenge. If you have any interest in these
kinds of things, please feel free to give me a call. I’d be happy to talk
with you.
This is a final reminder: I’ll be presenting my tutorial “Optomechanical Analysis” at the SPIE’s
Orlando conference on Defense and Security. The time and date are,
12 April 2007
830 AM to 530 PM
Orlando World Center Marriott Resort and Convention Center
In it I’ll be discussing and comparing various methods to evaluate
the mechanical engineer’s impact on the optical instruments and systems.
You may read the abstract and sign-up for the course by
clicking the following web-site:
I’ll also be Exhibiting at Booth No. 1307.
I’ll be passing out complimentary demonstration copies of my Ivory Optomechanical Modeling Tools as
long as they last. Please drop by and say “Hello.”
I have recently finished the mechanical design of a very high precision optical vibrometer (it can measure picometer motions at distances of kilometers). I helped to conceive the instrument and my name is one of those on my client’s patent application. It all came out of a brain-storming session about two years ago. It was intended for use by one individual so size and weight were critical.
The design was developed as a 3D solid model in AutoCad 2007. A partial view of the assembly is attached. It is a zooming optical system with six (6) moving lens groups. The lens groups are all servo-controlled. An alternate lens attachment (not shown) permits working distances as short as 50 meters. The layout along with indentured drawing and parts lists were delivered to my customer who wished to prepare the (160 or so) mechanical drawings in-house. They converted the AutoCad file to ProE for their draftsmen without difficulty and are now proceeding into the hardware.
I’m looking around for another interesting project. If you think you might have something I’d like to talk to you about it.
I hope the beginning of 2007 has found you healthy and prosperous.
Welcome all to the grand year of 2007! This is also the 20th anniversary of SPIE’s Optomechanical/Instrument International Technical Group.
On August 20, 1987, we had our first gathering during SPIE’s Annual Meeting in San Diego. That first meeting was chaired by Roger Reiss and the agenda included Roger, Bill Barnes Jr., Paul Yoder, Dan Vukobratovich, Don O’Shea, Warren Smith and myself. The assembly elected Roger to be the first chairman of the Group and we decide to organize our own conferences dedicated to the arts of optomechanical engineering and instrument design. We’ve been presenting them every-other year (and sometimes more frequently) ever since.
This summer we will be presenting our biennial conference (see the attachment). This is the perfect opportunity to get the acclaim you deserve for all your hard work and to network with the best pool of technical talent in our industry.
We are also planning an informative evening meeting that should stimulate conversation and a lot of good ideas. Last year we stirred-up the metrology activities at SSG-Tinsley. Who knows what trouble we’ll get you into this August?
I plan to renew old friendships, stir-up some new ideas, meet new people and have a great time. Just what this great year, 2007, ought to be all about!
We have been very busy this year: a very advanced multi-spectral sensor, an active remote optical sensor with six moving lens groups, actuators for an spacecraft assembly shop and a FLIR with stringent boresight requirements (among other joys). I’ll try to get out more on these later.
We have also been busy incorporating NASTRAN unified modeling capabilities into Version 2.0 of our Ivory(tm) Optomechanical Modeling Tools suite of software.
As an expression of the Season’s Goodwill we will honor all purchases of Ivory2 received by January 31, 2007, by including the NASTRAN unified modeling tools and respecting our current prices. Just the kind of offer to tickle an optomechanical engineer’s sugar-plumb dreams.
For more information on Ivory2 please open the attachment or visit our web site.
Have a Merry Christmas and a Happy New Year!
Let the good times roll.
from all us folks at Alson E. Hatheway Inc. December 12, 2006
The Rubicon actuator resulted from a competition that was
initiated by NASA. In 1996 the Langley
Research Center let four contracts for development of actuators suitable for
deformable mirror applications. The
Rubicon actuator was the only one to complete its testing and deliver a
prototype device along with the final report1. Figure 1 shows the
Figure 1. Initial
Rubicon prototype actuator.
prototype device delivered on that contract. This actuator was tested by NASA’s Jet Propulsion
Laboratory (a task required by the Langley contract) at both room temperature
(300 K) and cryogenic temperature (25 K) and found to satisfy the requirements
for a space-quality structural actuator suitable for controlling the figure of
primary mirrors. It was a two-stage
device with a stroke of 10 millimeters (coarse stage) and a repeatability of
3.8 nanometers (fine stage) with excellent stability, low power dissipation and
complete set-and-forget capability.
The Rubicon actuator was subsequently adopted by Goodrich
Corporation for their development effort on NASA Marshall’s Advanced Mirror
System Demonstrator project. Two new
actuators were designed around Goodrich’s requirements: A new two-stage actuator with 8 millimeters
of stroke (coarse) and 9 nanometers repeatability (fine) and a new single-stage
fine actuator with 90 micrometers of stroke and 9 nanometers
repeatability. A sectional view of the
new two-stage Rubicon actuator is shown in Figure 2.
It shows the coarse drive motor on the left that drives the
output bracket (on the right) by a lead-nut driven pushrod. The pushrod travels 9 millimeters along the
axis of the actuator. The fine stage
controls the position of the coarse stage and the pushrod. It is located between the coarse drive motor
on the left and the mounting surface at the right. The fine drive motor turns a harmonic drive
unit (reduction of 100:1) that in turn drives a lead-screw. The nut on the lead-screw compresses a coil
spring that pushes against the housing of the coarse drive motor. The compression in the spring creates a
tensile load in the cylindrical housing of the actuator and by changing the
spring loading the length of the cylindrical housing may be changed by small
amounts. The position of the output
bracket (on the right) is therefore controlled by the sum of the displacements
of the coarse (lead-nut driving the pushrod) and fine (extension and contraction
of the cylindrical housing) stages of the actuator. Large and small motions may be generated by
driving either the coarse or fine drive motors (or both, as the operator
desires).
Since both motors are stepping-type motors they can be
driven to a desired position by a controller that counts the steps. When the current is removed the detent torque
of the motors hold the actuator in position.
All materials of construction are aerospace-grade structural metals (stainless
steel and titanium) and can be designed to support great loads with high
reliability.
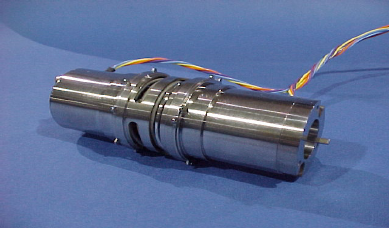
Photographs of both the single-stage and the dual-stage
Rubicon actuators are shown in Figure 3.
a) Dual-stage Rubicon actuator
b) Single-stage Rubicon actuator
Figure 3. a)
Dual-stage and b) single-stage Rubicon actuators.