Colleagues:
You more astute readers have made a good point about my call for completeness and congruence in the modeling data for Nastran optomechanical models: These properties are a necessary condition but, alas, not sufficient.
The goal is to achieve computational zeros in the sums of a few dozen terms of a finite element model that may itself contain a few million terms. But “computational zero” is a relative, not an absolute, term. The engineer needs to demonstrate that the actual value of the computational zeros are small enough to be ignored. Rigid body checks alone can’t do that.
And no technology is more sensitive to this issue than optics. For instance:
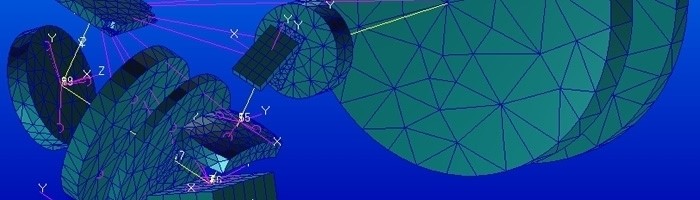
AEH was called to verify the predicted magnitude of dynamic jitter in a spectral imaging system. AEH assembled an all-up meshed solid finite element Nastran model of the system, put the optical prescription through the AEH/Ivory Optomechanical Modeling Tools to generate the complete and congruent data that control the motions of the image on the detector and ran the rigid body checks. Everything so far seemed reasonable.

Then AEH ran three-axis static gravity
checks. Considering the frequencies, displacements and accelerations the
instrument would see AEH judged that the computational zeros, which
dominated the rigid body checks, were two orders of magnitude too large
compared to the static gravity checks. Correcting this required three
more significant figures in the optomechanical modeling data (both the geometry
and the coefficients) for sufficient precision in the dynamic jitter analysis.
Fortunately, the software also produces both geometric and coefficient data
with eighteen significant figures. AEH was able to edit the additional
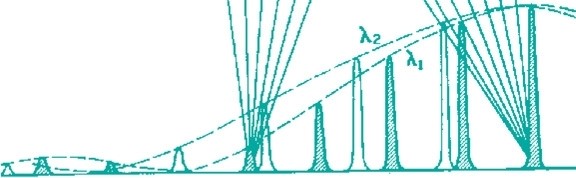
significant figures into the Nastran database. Finally, AEH ran the
frequency response spectrum. The image jitter proved to be safely within
the system’s specified maximum.
But, the engineer had to take the critical steps to demonstrate sufficient
precision in the optomechanical modeling data.
AEH offers completeness, congruence and
precision in those critical optomechanical analyses.
Well, the March Hare is here, “I’m late, I’m late, I’m late!”
And as Lewis Carol further wrote, “The time has come….”
See you all in Baltimore.
Al H.
3-17-14