Colleagues:
It’s a Small World!
A short time ago AEH was
recruited, somewhat blindly I thought, to sit on a “Red Team”
to review a challenging zoom lens design. I say “somewhat
blindly” because I had never met nor corresponded with the client. I
had been referred to him by a third party. Anyway, I accepted the
assignment and went to a remote corner of Massachusetts in the dead of Winter
to “throw darts” in a dark room.
Much to my surprise I knew the optical designer quite well. We had worked
together on a laser projection entertainment system some 25 years earlier and
2,500 miles West. It was grand to see him again but the lights soon
dimmed and I was invited to my chair to organize my darts for the day.
But, the world got even smaller. The “Red Team” was composed of
individuals from at least a half-dozen different organizations, all with some
interest in the project, and at lunch break I sat next to a man named George
who seemed to know me, or know of me. At one point he enquired about the Rubicon cryogenic actuator! I admitted to
being its inventer/developer.

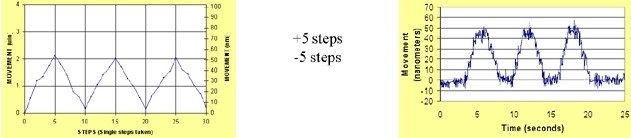
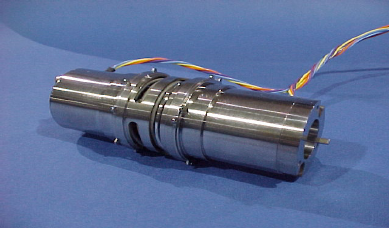
320 deg. K 27 deg. K
NASA had let three contracts for the development of nanometer-class structural actuators that had to operate over the temperature range of 30 K to 320 K with repeatability of less than 10 nanometers. AEH won one of the contracts and produced the only working prototype, when tested in NASA labs. And the Rubicon won AEH a position on one of the teams, George’s team as it turned out, vying for the James Webb Space Telescope.
George’s firm missed the contract, sadly, but he tells me the Rubicon actuators worked flawlessly and are alive and well in some warehouse in Huntsville. (Or is it Area 51 in New Mexico?)
Its a Small, Small World indeed! And what a mid-winter joy it was to meet some of you again.
Al H.
3-16-18